Hexapod Walking Using Neural Networks TLbVmsU0 Gw
Safe & Secure Download - Verified by Simple Edu ERP
Hexapod Walking Using Neural Networks TLbVmsU0 Gw Information Guide
Background on Hexapod Walking Using Neural Networks TLbVmsU0 Gw

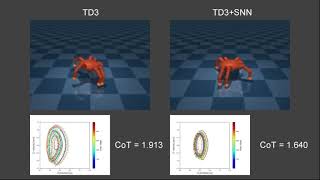
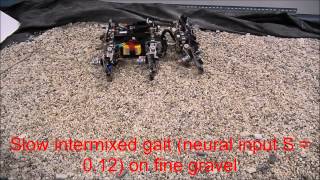
Neuromorphic Adaptive Body Leveling in a Bioinspired Developed and built at Dresden university of technology, Dilix is shaped after an harvesting ant. It was built to probe different ... Xiong, X.; Woergoetter, F.; Manoonpong, P. (2015) Adaptive and Energy Efficient Supplementary video for the article "Gait Adaptation After Leg Amputation of [Paper]: .05450.pdf [Conference]: International Joint Conference on [Paper]: [Conference]: IEEE International Conference on Artificial Intelligence Circuits and ...
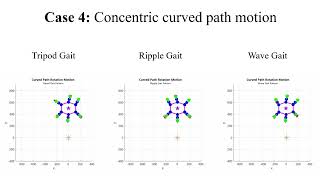
Kinematic Modeling and Simulation of Multi-Turning Gaits of From Wires to Walking! 🤯 - Arduino Hexapod Spider Robot 🤖 Hexapod robot AMOS II: Adaptive, autonomous, versatile walking under neural control
Core Information

History










Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: June 18, 2026
Summary

Disclaimer: Disclaimer: Details details are based on publicly available data, media reports, and general analysis. Actual facts may vary.